University of Macau’s innovative system enhances diagnostic imaging by stabilising contact force amidst physiological fluctuations.
From Beijing Institute of Technology Press Co., Ltd 12/06/25 (first released 11/06/25)
Recent advances in robotic ultrasound systems have shown promise for improving diagnostic imaging consistency.
However, maintaining stable contact force across dynamic physiological changes (e.g., breathing, tremors) without continuous sensor recalibration remains a critical hurdle.
“By integrating a hybrid active-passive force control mechanism, our method decouples force regulation from real-time feedback dependencies while ensuring adaptability across patients,” stated corresponding author Qingsong Xu, a professor at the University of Macau.
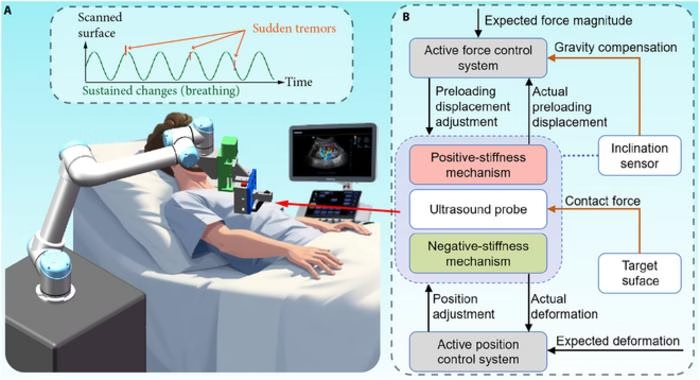
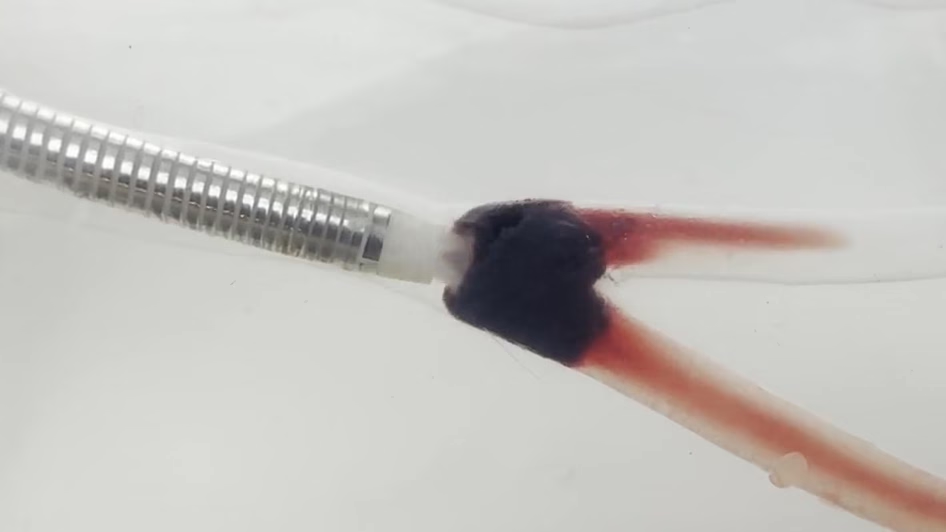
The tripartite system combines (a) a passive constant-force mechanism (positive/negative stiffness beams) for vibration buffering, (b) strain gauges for real-time deformation monitoring, and (c) active positioning stages for gravity compensation and force adjustment.
“This design guarantees force stability by absorbing high-frequency disturbances passively while actively compensating for sustained displacements,” added lead author Zehao Wu.
The framework was validated in experiments with silicone models and human subjects under simulated physiological vibrations.
The passive mechanism achieved ≤7.20% force variation within its constant-force region (adjustable range: 12.33–21.29 N), isolating tremors of up to 15 Hz frequency and tolerating breathing-induced displacements (0.3 Hz, 6 mm amplitude).
Active control maintained force consistency across inclinations (e.g., 1.11 N gravity compensation at 25° tilt), while robotic operation reduced image oscillation velocities by >50% compared to manual scans (0.55 mm/s vs. >1.0 mm/s).
Compared to pure active force control, the hybrid system eliminated overshoot risks and reduced reliance on high-bandwidth sensors.
“Strain-based feedback enabled precise tuning of the constant-force zone, synchronizing probe contact with tissue compliance,” noted Wu. Limitations include restricted force-range coverage (12–21 N) and mechanism size constraints.
Future work will develop multi-range mechanisms and integrate semi-autonomous path planning.
This study advances medical robotics by fusing mechanical intelligence with adaptive control, enabling robust, operator-agnostic ultrasound imaging.
Authors of the paper include Zehao Wu, Xianli Wang, Yuning Cao, Weijian Zhang, and Qingsong Xu.
This work was supported in part by the National Natural Science Foundation of China under grant 52175556; the Macao Science and Technology Development Fund under grants 0004/2022/AKP, 0102/2022/A2, 0078/2023/RIB3, and 0047/2024/ITP2; and the University of Macau under grants MYRG-GRG2024-00222-FST-UMDF and MYRG-CRG2022-00004-FST-ICI.
The paper, “Robotic Ultrasound Scanning End-Effector with Adjustable Constant Contact Force” was published in the journal Cyborg and Bionic Systems on May 2 2025, at DOI: 10.34133/cbsystems.0251.
More info
You may also be curious about:
-
Understanding the mechanisms of embryonic cell behaviour
-

Rings of time: unearthing climate secrets from ancient trees
-

From puck drop to brain pop: Analysing hockey fan reactions
-
First direct observation of the trapped tsunami waves that shook the world
-
Oxford physicists recreate extreme quantum vacuum effects in simulation
-
Tiny device spins blood clots away
-

Skin bacteria help protect us from sunlight
-

New brain-reading video game reduces chronic nerve pain
-

Black tea and berries could contribute to healthier aging
-

Viral mouth-taping trend ‘sus’ says Canadian sleep expert
-

New sodium fuel cell could enable electric aviation
-
The most extreme solar storm hit Earth over 14,000 years ago, scientists identify