South Korean researchers have developed a wheel with variable stiffness and spoke system inspired by liquid droplets’ surface tension.
From Superinnovators 22/07/24
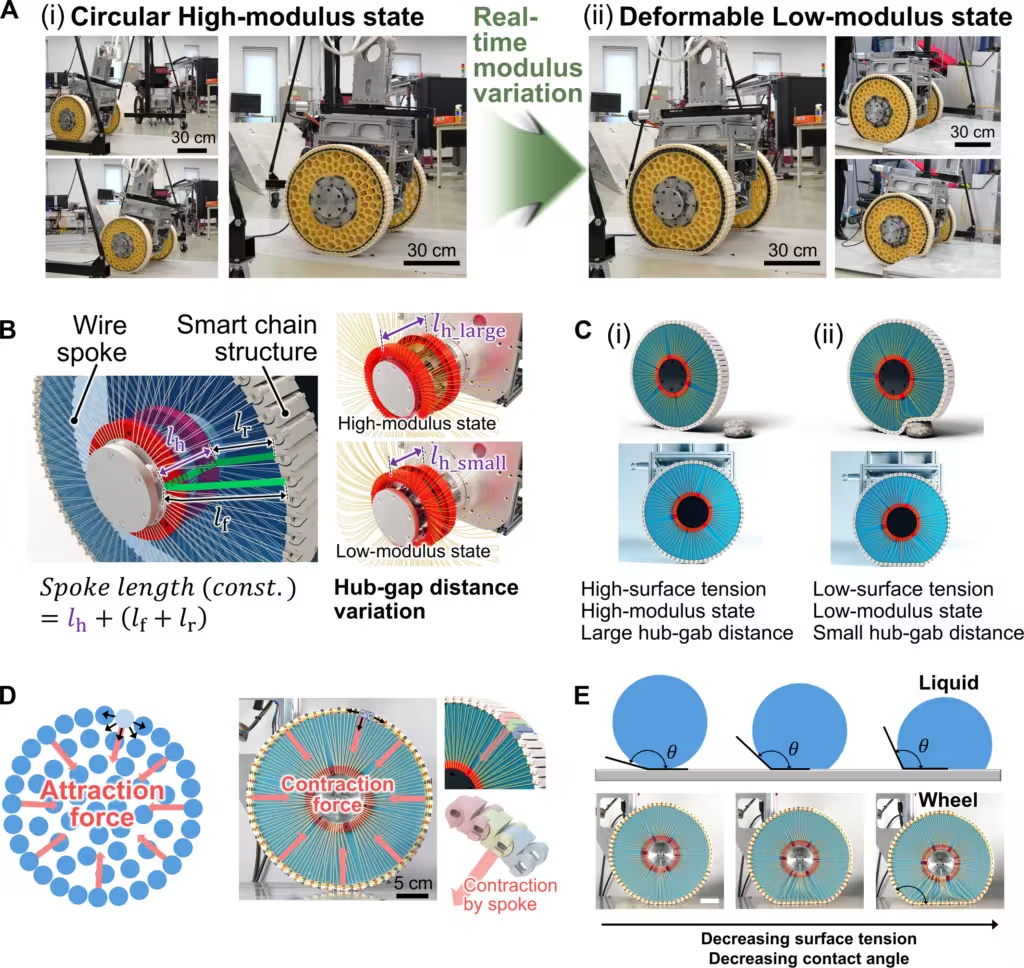
This innovative wheel can change between a rigid, circular shape and a soft, deformable form, adapting to different terrains, such as those encountered by wheelchair users or rovers on Mars or the Moon.
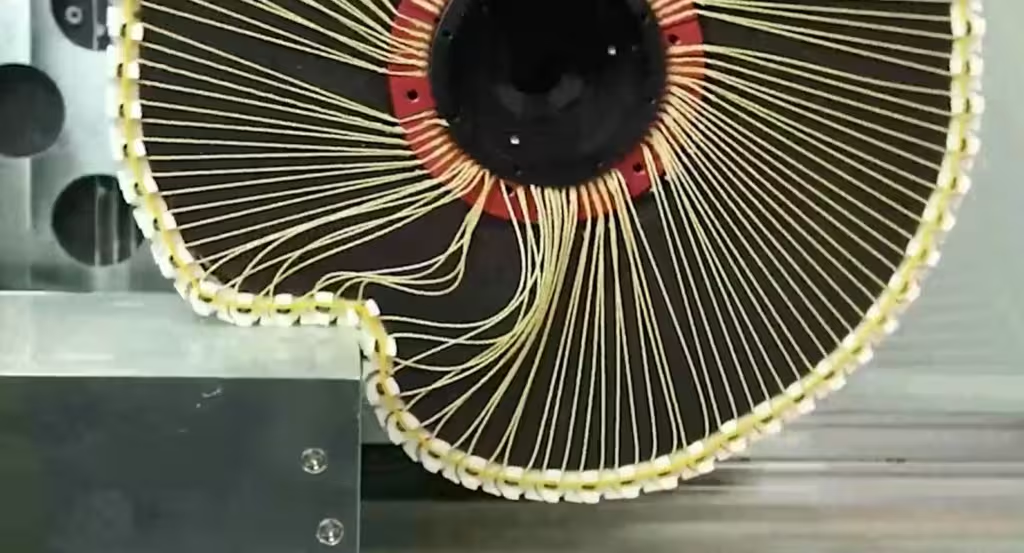
The wheel’s smart chain structure connects to a central hub via wire spokes, which adjust the tension to alter the wheel’s stiffness.
The wire spokes were made from Kevlar fiber with a thickness of 2 mm and a 3D printed honeycomb structure were used as a soft supporting structure.
On flat surfaces, the wheel remains rigid, allowing for faster movement.
When encountering obstacles, the wheel becomes softer, deforming to roll over them more easily.
This design was tested on both a two-wheeled self-balancing wheelchair and a four-wheeled electric cart.
The wheel successfully navigated obstacles 1.2 times its radius, demonstrating its adaptability in real-time.
(A) Configuration of the soft supporting structure and the pin in the smart chain block. (B) Diagram of the simplified one-dimensional wheel model showing the effect of the length of the wire spoke. (C) Diagram of the simplified two-dimensional wheel model showing the effect of the length of the wire spoke. (D) Shape of the deformed wheel considering that the gravitational force depends on the hub-gap distance variation. (E) Measured length of the wire spoke at the deformed position from the ground based on the hub-gap distance variation. Error bars represent SD (n = 5). The deformation height of the wheel based on the hub-gap distance variation achieved with (F) a blue sponge or (G) a black sponge as the soft supporting structure. Error bars represent SD (n = 3). Credit: Jae-Young Lee et al, Science Robotics (2024)
However, the researchers noted some drawbacks including that dust and particles could enter between the smart chain blocks, potentially damaging the wheel.
Future improvements will include a wheel cover and using more durable materials like thermoplastic polyurethane.
Additionally, the wire spoke structure will be enhanced for better durability and reliability.
The team also plans to develop advanced simulations to predict the wheel’s deformation characteristics more accurately.
According to the researchers, these wheels could revolutionise mobility across varying environments.
The project was led by Jae-Young Lee of the Advanced Robotics Research Center in Daejeon, South Korea and the results were published in Science Robotics journal.
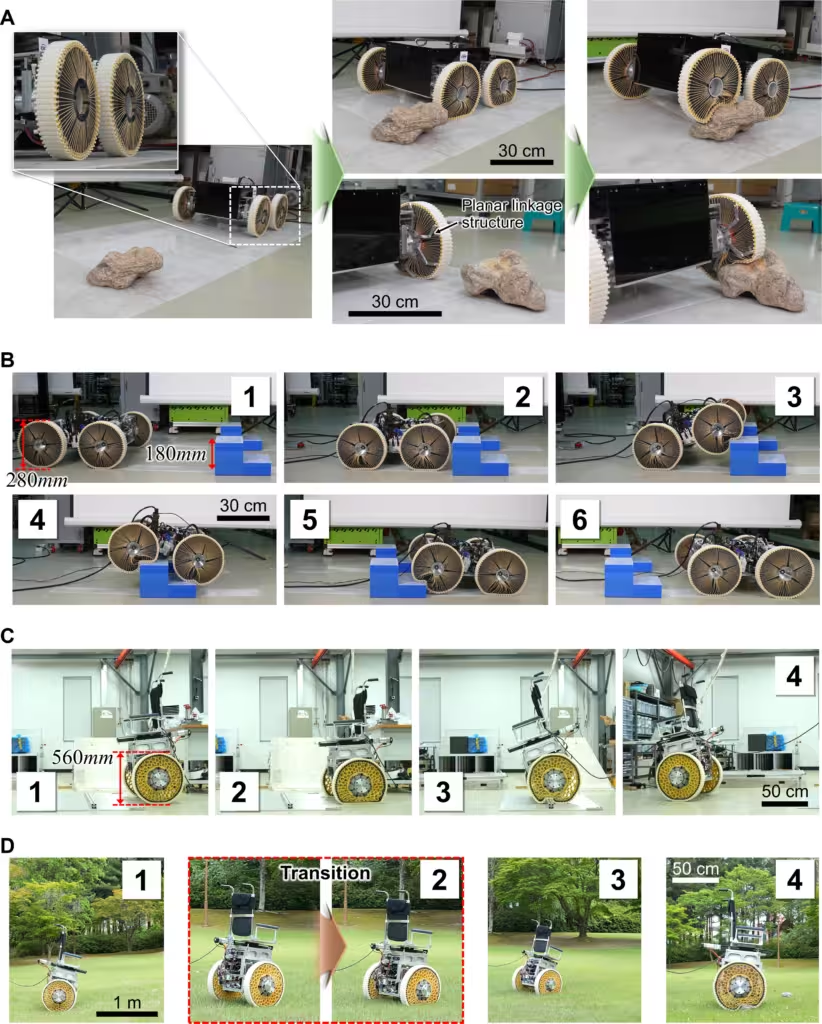
Demonstration of a four-wheeled vehicle overcoming a (A) rock and a (B) 180-mm step-shaped obstacle. Demonstration of a two-wheeled wheelchair system overcoming a (C) square obstacle and a (D) rock. Credit: Jae-Young Lee et al, Science Robotics (2024)
More info
You may also be curious about:
-

‘Space archaeology’ reveals first dynamic history of a giant spiral galaxy
-
Thousands of pico-satellites may transform how phones connect to space
-

Barcelona’s Low Emission Zone reduces NO₂ levels
-

Neuroadaptive VR treatment for arachnophobia
-
The freshwater hidden beneath the Great Salt Lake
-

Moby Dick ‘ship sinking’ sperm whales caught headbutting on camera
-

Changing shower and toilet habits could help close England’s 5 billion litre water gap, Surrey-led research finds
-

Is your brain aging faster than you are? Sleep may hold the key
-

Initial tests find lead in children’s fast-fashion clothing
-
Aquatic plant reduces antibiotics in water and genetic damage in fish
-

When the Earth moved
-

Turning sawdust into fire-resistant, eco-friendly materials using watermelon seeds