A research team from the Laboratory of Intelligent Systems at EPFL, Switzerland, have introduced an unmanned aerial vehicle (UAV) that can perch on vertical poles using a passive wing morphing technique.
From Superinnovators 19/07/24

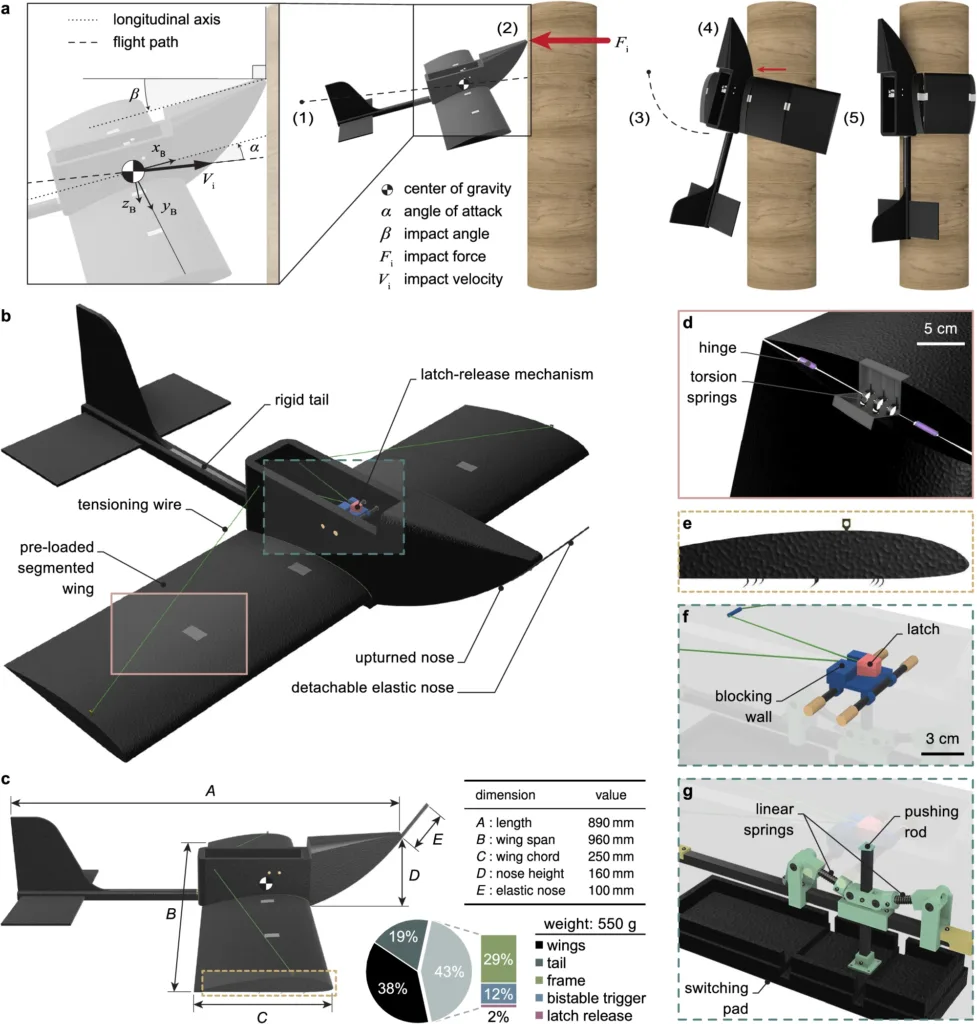
The UAV, dubbed PercHug, utilises dual-purpose wings inspired by bats and owls to achieve both aerial gliding and perching.
PercHug features an “upturned nose” design that facilitates reorientation from horizontal to vertical flight upon a head-on collision with a pole.
This design eliminates the need for complex control manoeuvres typically required in such operations.
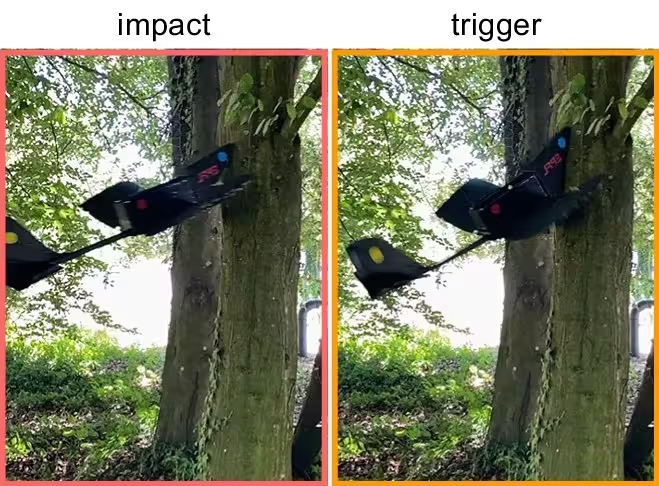
The wings, segmented and pre-loaded with torsion springs, wrap around the pole on impact, mimicking the perching strategies of certain flying animals like the great grey owl.
It can hold onto various types of poles with diameters larger than 28% of its wingspan and demonstrated a 73% success rate in crash-perching on tree trunks.
The study also noted that the UAV’s performance is not significantly affected by variations in pole material or size (above 28% of wingspan), making it versatile for different environments.
In developing PercHug, the team aimed to address the limitations of existing UAVs in landing or perching on complex structures.
Traditional methods often require complex control systems or intricate mechanical appendages, but PercHug relies on a passive approach inspired by the adaptability of animal limbs in gripping and holding onto trees.
The design strategy avoids dedicated perching feet structures, which would increase body mass and complexity, opting instead for a dual-use strategy leveraging existing UAV elements.
The researchers also investigated the performance of PercHug in terms of impact speed and angle.
They found the UAV can reorient successfully at impact angles above 15° and speeds ranging from 3 to 9 m/s.
This innovation opens up new possibilities for UAV applications in inspection, maintenance, and biodiversity conservation.
The researchers plan to further enhance the UAV’s capabilities by integrating autonomous flight and targeting systems, as well as mechanisms for unperching and re-perching.
The detailed study and findings are documented in the Communications Engineering journal.

More info
You may also be curious about:
-

How climate change is altering the Earth’s rotation
-
VIDEO: Radiant hit portable micro nuclear reactor milestone
-

Bioengineering plants that produce their own nitrogen fertilizer
-

NASA’s Webb investigates eternal sunrises, sunsets on distant world
-

Researchers confirm health benefits of replacing butter with plant oils
-

Indian startup rolls out smart plane docking system
-
Brain-imaging study reveals curiosity as it emerges
-
Real-life ‘stillsuit’ allows astronauts to drink pee
-

New prosthetic foot mimics bones to boost flexibility
-

New carbon storage technology is fastest of its kind
-

Joby’s hydrogen VTOL air taxi completes landmark 523-mile flight
-

Air Station Pod-01: Inflatable outdoor living space