From Cornell University, 25/1/2023
One of the virtues of untethered soft robots is their ability to mechanically adapt to their surroundings and tasks. Now they are poised to become even more agile and controlled.
A team of researchers led by Kirstin Petersen, assistant professor of electrical and computer engineering at Cornell University, designed a new – and surprisingly simple – system of fluid-driven actuators that enable soft robots to achieve more complex motions.
The researchers accomplished this by taking advantage of the very thing – viscosity – that had previously stymied the movement of fluid-driven soft robots.
The team’s paper, “Harnessing Nonuniform Pressure Distributions in Soft Robotic Actuators,” published in Advanced Intelligent Systems.
Petersen’s Collective Embodied Intelligence Lab has been exploring ways to take a robot’s cognitive capabilities and behaviors and offload them from the “brain” onto the body, via the robot’s mechanical reflexes.
By reducing the need for explicit computation, the robot can become simpler, more robust and less expensive to manufacture.
“Soft robots have a very simple structure, but can have much more flexible functionality than their rigid cousins. They’re sort of the ultimate embodied intelligent robot,” Petersen said.
“Most soft robots these days are fluid-driven. In the past, most people have looked at how we could get extra bang for our bucks by embedding functionality into the robot material, like the elastomer. Instead, we asked ourselves how we could do more with less by utilizing how the fluid interacts with that material.”
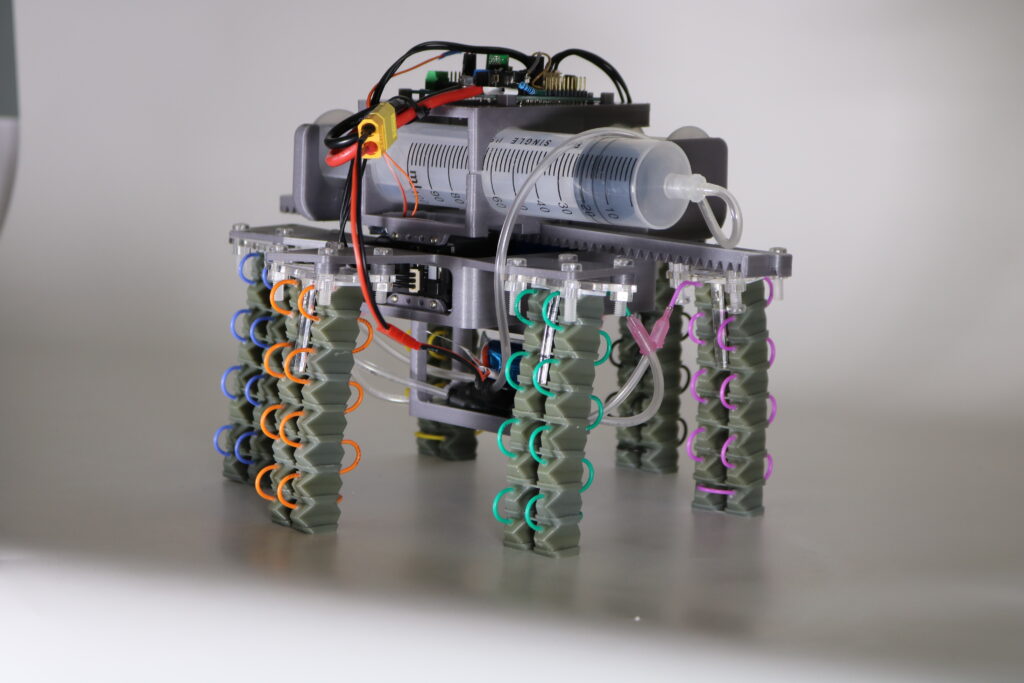
Petersen’s team connected a series of elastomer bellows with slender tubes. This configuration allows for antagonistic motions – one that pulls and one that pushes.
The tiny tubes induce viscosity, which causes the pressure to be distributed unevenly, bending the actuator into different contortions and motion patterns.
That would normally be a problem, but the team found a clever way to take advantage of it.
Researchers developed a full descriptive model that could predict the actuator’s possible motions – all with a single fluid input.
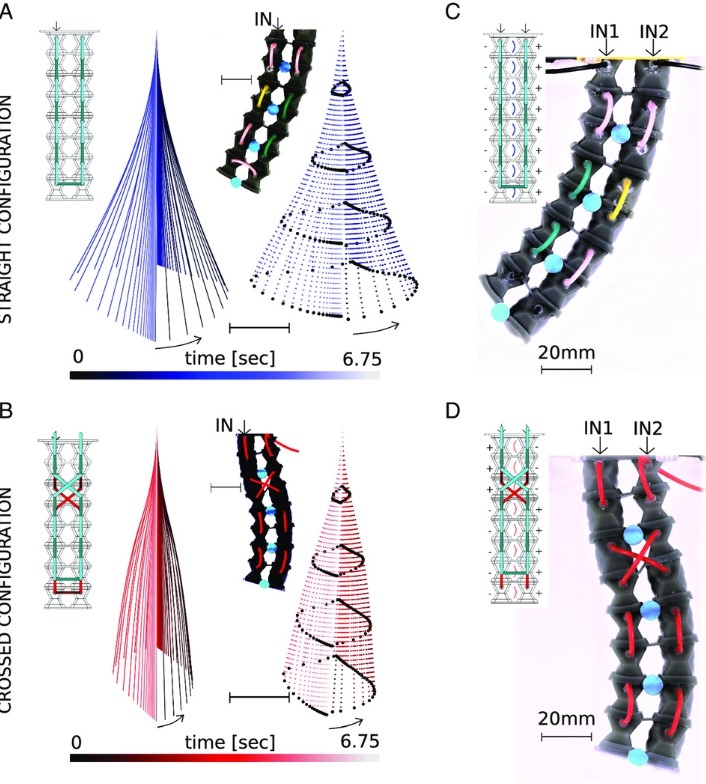
That results in an actuator that can achieve far more complex motions, but without the multiple inputs and complex feedback control that previous methods required.
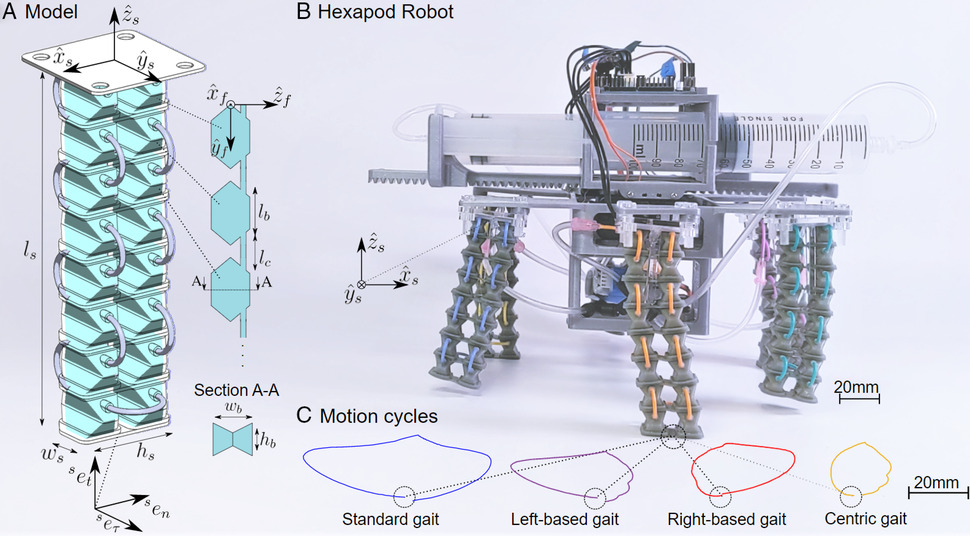
To demonstrate the technology, the team built a six-legged soft robot, with two syringe pumps on top, that walks at 0.05 body lengths per second, and crouches as well. But those are only the beginning of the possible permutations.
“We detailed the full complement of methods by which you can design these actuators for future applications,” Petersen said.
“For example, when the actuators are used as legs, we show that just by crossing over one set of tubes, you can go from an ostrich-like gait, that has a really wide stance, to an elephant-like trot.”
The new fluid-driven actuator could be used for different types of devices, such as robot arms, and Petersen is interested in exploring how placing bellows in 3D configurations will result in even more useful motion patterns.
“This is basically a whole new subfield of soft robotics,” she said. “Exploring that space will be super interesting.
Links
https://onlinelibrary.wiley.com/doi/10.1002/aisy.202200330


Your article helped me a lot, is there any more related content? Thanks!
I don’t think the title of your article matches the content lol. Just kidding, mainly because I had some doubts after reading the article.
Thank you, your article surprised me, there is such an excellent point of view. Thank you for sharing, I learned a lot.
I don’t think the title of your article matches the content lol. Just kidding, mainly because I had some doubts after reading the article.
I don’t think the title of your article matches the content lol. Just kidding, mainly because I had some doubts after reading the article.
Thanks for sharing. I read many of your blog posts, cool, your blog is very good. https://www.binance.info/ru-UA/register-person?ref=OMM3XK51
Thank you for your sharing. I am worried that I lack creative ideas. It is your article that makes me full of hope. Thank you. But, I have a question, can you help me?
Thank you for your sharing. I am worried that I lack creative ideas. It is your article that makes me full of hope. Thank you. But, I have a question, can you help me?
Thanks for sharing. I read many of your blog posts, cool, your blog is very good.
References:
Online casino slot machines
References:
https://medibang.com/author/27975302/
how to get a steroid prescription
References:
gaiaathome.eu
References:
Apex casino strazny
References:
https://graph.org/Skycrown-Casino-Australia-Expert-Review–Bonuses-04-20
References:
All slots casino mobile
References:
https://casino-coupons-no-deposit.online-spielhallen.de/
References:
Casino campione
References:
https://casino-auszahlung-innerhalb-minuten.online-spielhallen.de/
References:
Jena
References:
https://play-mojo-casino.online-spielhallen.de/
References:
Casino washington state
References:
chitsime.org
References:
Sands casino las vegas
References:
mvacancy.com
References:
Lucky star casino concho
References:
twsing.com
References:
Wynn casino las vegas https://myaxklt044312.ivasdesign.com
References:
Blackjack chart https://headlinelog.space/item/hitnspin-casino-sterreich-2026-bis-zu-800-200-fs
References:
Politikuri tamashi https://jonaskbqt193325.blogchaat.com/
References:
Cocoa casino http://adrestyt.ru/user/sudantie65/
References:
Casinos poland elaineaoxm638060.blogacep.com
References:
Games casino https://forum.board-of-metal.org/user-50174.html
Your point of view caught my eye and was very interesting. Thanks. I have a question for you.
References:
Legiano Casino Slots http://xtpanel.xtgem.com/
References:
Monte cassino italy http://www.google.gp/url?q=http://taxref.i3s.unice.fr/describe/?url=https://de.trustpilot.com/review/owowear.de
References:
Legiano Casino Auszahlungslimit https://kaptur.su/proxy.php?link=https://mavlink.to/ninaatchley506
References:
Park casino
References:
images.google.com.eg
References:
Ac online casino
References:
jugem.jp
References:
Roulette numbers
References:
http://maps.google.ca/
References:
Tropicana casino online
References:
rr-clan.ru
References:
Florida casinos
References:
http://www.google.ca/
References:
No deposit sign up bonus
References:
pagekite.net
References:
Casino slots online
References:
chaturbate.com
References:
Virtual roulette
References:
http://www.google.ac/
References:
Malaysia central gaming
References:
bcul.lib.uni.lodz.pl
References:
Syracuse casino
References:
https://shatunamur.ru/proxy.php?link=https://icu.re/jodi0367986765
References:
Casino washington state
References:
http://images.google.by
References:
Legiano Casino Download skin-skin5–shop2.socksappeal.cafe24.com
References:
Legiano Casino Bonusbedingungen http://burgman-club.ru/
References:
Legiano Casino Verifizierung http://shop2.parisyang.cafe24.com/
Современная нейросеть для создания порно контента вышла на совершенно новый уровень. Теперь порно раздеватор отлично справляется с обработкой сложных фотографий, сохраняя естественные пропорции тела, текстуру кожи и реалистичное освещение. А если вы хотите добавить динамику, то нейросеть раздеватор поможет превратить статичное фото в короткое возбуждающее видео.
создания порно контента
References:
Legiano Casino Neukundenbonus captcha.2gis.ru
References:
Legiano Casino 2026 http://forum.vhfdx.ru/go.php?url=aHR0cDovL3phbm9zdHJveS5ydS9nbz91cmw9aHR0cHM6Ly9kZS50cnVzdHBpbG90LmNvbS9yZXZpZXcvYmV5b25kamV3ZWxsZXJ5LmRl
References:
Legiano Casino Erfahrungen phy.bnl.gov
References:
Legiano Casino Lizenz https://bmwclub.lv/
References:
KingMaker Casino Geld einzahlen wsurl.link
References:
KingMaker Casino 200% Bonus https://yuklink.me
References:
KingMaker einzahlung bonus code http://clients1.google.by/url?q=https://de.trustpilot.com/review/beyondjewellery.de
References:
KingMaker einzahlen http://orienteering.sport/go-to/?url_to=https://de.trustpilot.com/review/beyondjewellery.de
References:
KingMaker einzahlung sofortüberweisung http://runigma.com.ua/proxy.php?link=https://bybio.co/caridadhay
References:
Kingmaker casino einzahlungsbonus code 2026 https://www.wolvden.com
References:
Hitnspin casino auszahlung erfahrungen http://images.google.am/url?q=https://uplink.in.gov/CSS/logout.htm?url=https://de.trustpilot.com/review/der-wikinger-shop.de
References:
Hitnspin casino app android https://structurizr.com/
References:
Monro Casino Deutschland piratebooks.ru
References:
Hitnspin casino mit echtgeld maps.google.cv
References:
Hitnspin casino no deposit bonus typhon.astroempires.com
References:
Hit n spin no deposit bonus http://omga.su/
References:
Hitnspin app http://captcha.2gis.ru/
References:
Hitnspin casino app iphone http://rodomontano.altervista.org
References:
Hitnspin casino paysafecard https://anf.asso.fr/
References:
Lollybet Alternative rtraveler.ru
References:
Lollybet Willkommensbonus http://toolbarqueries.google.com.tw
References:
Lollybet Casino Roulette cse.google.gy
References:
Lollybet Casino Auszahlungsdauer https://www.rufox.ru/go.php?url=https://nutritionwiki.space/wiki/1_000_Bonus_Slots_schnelle_Auszahlung
References:
Lollybet Casino Bewertung https://myseldon.com/away?to=https://dancewiki.site/wiki/1_000_Bonus_Slots_schnelle_Auszahlunghttps://myseldon.com/away?to=https://dancewiki.site/wiki/1_000_Bonus_Slots_schnelle_Auszahlung</a
References:
Hit’n’spin casino 50 free spins http://clients1.google.gg/url?q=https://pad.stuve.de/s/M6Lkjfzxz
References:
Hitnspin casino spiele maps.google.com.sg
References:
Hitnspin casino auszahlung erfahrungen http://images.google.pn
References:
Instant payid pokies australia abadeez.com
References:
Best instant payid pokies australia real money askmeclassifieds.com
References:
Payid pokies instant withdrawal https://wordpress.aprwatch.cloud/
References:
Australia online pokies payid http://www.cbl.aero
References:
Payid pokies list https://dev-members.writeappreviews.com/employer/payid-withdrawal-casinos-australia-2026-instant-pay-kosciuszko-design-solutions/
References:
Lollybet Casino Treueprogramm http://clients1.google.mk/url?q=https://ceyss.link/uNayX
References:
Lollybet Casino Zahlungsmethoden https://www.4runners.com/out/?url=https://degreecritical.com/vidapederson32
References:
Lollybet Support m.landing.siap-online.com
References:
Lollybet Auszahlung https://25.cholteth.com/index/d1?diff=0&utm_source=ogdd&utm_campaign=26607&utm_content=&utm_clickid=g00w000go8sgcg0k&aurl=https://tinyurl.ee/laylaseay61189
References:
Lollybet Casino Bitcoin http://www.htcdev.com/